
Medicine and HealthCOMMUNICATIONS CHEMISTRY
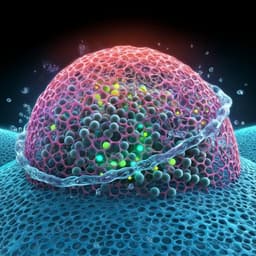
Water-powered self-propelled magnetic nanobot for rapid and highly efficient capture of circulating tumor cells
R. D. Wavhale, K. D. Dhobale, et al.
Discover a groundbreaking magnesium·Fe₃O₄-based Magneto-Fluorescent Nanorobot that self-propels in blood, enabling the nearly perfect isolation of cancer cells. Developed by Ravindra D. Wavhale and team at the Maharashtra Institute of Medical Education and Research, this innovative technology shows exceptional efficiency in capturing cancer cells, particularly MCF7 breast cancer cells, in serum and whole blood.
Related Publications
Explore these studies to deepen your understanding
Adjacent work that informs or extends this paper's methodology and findings.

Engineering and Technology
Highly durable and sustainable heterogeneous fabric using in-and-out fluorinated urethane coating for elimination of bacteria and oil-water separation
M. Choi, S. Park, et al.
Environmental Studies and Forestry
Interfacial assembly of self-healing and mechanically stable hydrogels for degradation of organic dyes in water
G. Yan, Y. Feng, et al.
Engineering and Technology
Silver coordination-induced n-doping of PCBM for stable and efficient inverted perovskite solar cells
C. Gong, H. Li, et al.

Environmental Studies and Forestry
Lattice distortion SnS₂ piezoelectric self-Fenton system for efficient degradation and detoxification of pollutants
R. Jiang, G. Lu, et al.


